BeagleBone® Blue
What is BeagleBone® Blue?
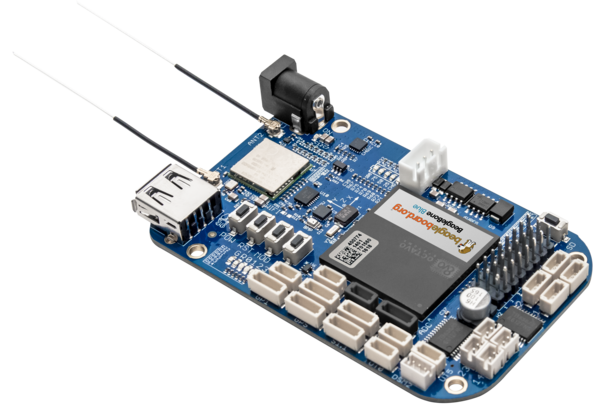
BeagleBone® Blue is an all-in-one Linux-based computer for robotics, integrating onto a single small (3.5" x 2.15") board the Octavo OSD3358 microprocessor together with wifi/bluetooth, IMU/barometer, power regulation and state-of-charge LEDs for a 2-cell LiPo, H-Bridges, and discrete connectors for 4 DC motors+encoders, 8 servos, and all of the commonly-needed buses for additional peripherals in embedded applications. Fully open source and actively supported by a strong community, the real-time performance, flexible networking, and rich set of robotics-oriented capabilities make building mobile robots with the Blue fast, streamlined, affordable, and fun.
Processor: Octavo Systems OSD3358
- AM335x 1GHz ARM® Cortex-A8 processor
- 512MB DDR3 RAM
- 4GB 8-bit eMMC flash storage
- Integrated power management
- 2×32-bit 200-MHz programmable real-time units (PRUs)
- NEON floating-point accelerator
- ARM Cortex-M3
- USB2 client for power & communications, USB2 host
- Programmed with Debian Linux
Connectivity and sensors
- Battery support: 2-cell LiPo with balancing, LED state-of-charge monitor
- Charger input: 9-18V
- Wireless: 802.11bgn, Bluetooth 4.1 and BLE
- Motor control: 8 6V servo out, 4 bidirectional DC motor out, 4 quadrature encoder in
- Sensors: 9 axis IMU (accels, gyros, magnetometer), barometer, thermometer
- User interface: 11 user programmable LEDs, 2 user programmable buttons
- Easy connect JST interfaces for adding additional buses and peripherals including: GPS, DSM2 radio, UARTs, SPI, I2C, 1.8V analog, 3.3V GPIOs
Software Compatibility
- ROS, ArduPilot
- MATLAB and Simulink
- LabVIEW
- Cloud9 IDE on Node.js
- Python, OpenCV, ... plus much more!


BeagleBone Blue Projects
ArduPilot
Mirko Denecke describes how he runs ArduCopter. You can also look how Jason built his.
EduMIP
is the world’s most extensible low-cost open platform for learning embedded control & robotics.
EduMIP ROS
Using Robot Operating System (ROS) with a balancing robot (EduMIP).
Bluetooth speaker
Connect a Bluetooth speaker.
Robot controlled webcam
Automatically start mjpg-streamer.
Add 2.4" LCD Connect and configure an Adafruit 2.4" LCD breakout board.
See More Projects »BeagleBone Blue Support
Frequently asked questions (FAQ)
First step: connect your Beagle to this site
Hardware, Software and Ecosystem Discussion Groups
Collaborate and find support on the Beagle community forum
IRC Group Chat
Live chat with other open-source enthusiasts
Books
Read books to help you learn fundamental concepts. Be sure to check out the code examples
for BeagleBone Robotics Projects, Second Edition
Hardware Specs and Materials
Browse the BeagleBone Blue Github page to find all available hardware specifications such as:- Bill of materials
- PCB source files
- Manufacturing files
- Schematic (PDF and source)
- System Reference Manual
Videos
BeagleBone Blue Overview
A quick exploration of BeagleBone Blue prepared for Embedded World 2017.
BeagleBone Blue Getting Started
Laura Hughes of Arrow walks you through the out-of-box experience along with several current quirks.
Educational Robots and Linux
Jason Kridner describes why educational robotics are critical for the future of Linux
BeagleBone Blue Webinar with Autodesk
.
